Hello, reader.
So today is a day after I was in class, but now that I’ve got some rest and have taken care of the other chores around the house, it’s about time I get to writing again about how my Robotics class has gone.
Yesterday afternoon, me, Urooj and Braxton attended our Robotics class after having had a reading assignment along with written summaries of the various vehicles described in our class book. If I haven’t talked about the book in my first post, I’ll take time to edit it in so you can check it out if you want.
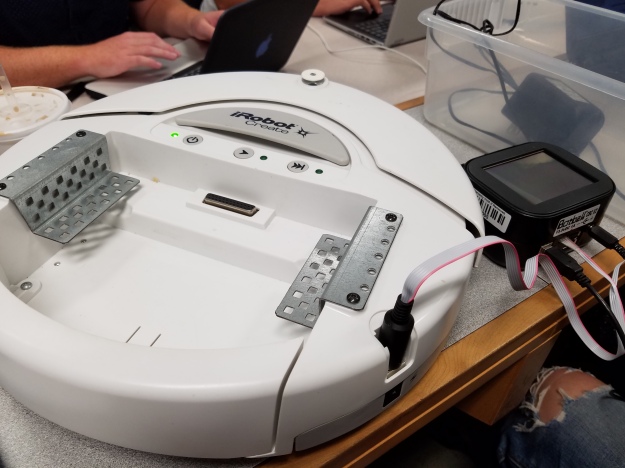
Anyways, similarly to how our first class went, we had another lab to complete. This time around, we were tasked with manually attaching light sensors to a robot through any input between 0-8 on the component that downloads and stores the C code from the computer we write it on. I will edit this blog post within a week to take some photos of the device and show and explain in better detail as to how we hook everything up.
So, we get the light sensors plugged in, and our Professor states that we need to surround the light sensors with a straw, black tape surrounding the straw to keep light from the sides of the sensors from throwing them off too much, and then to attach the light sensors using double sided tape about 45 degrees away from the middlemost point of the circular iRobot-create. So, imagine a circle with a line going from the center of the circle to the topmost portion of the circle, then two lines slightly apart from it going off in either direction.
The light sensors, positioned in such a way, would be able to more accurately track light levels along with the minor modifications we made to it. The straw and tape combo made for a useful casing around the sensors themselves.
So, now we have the iRobot-create set up with light sensors attached through the device that contains the code and is simultaneously connected to the iRobot itself. This provides the iRobot with the ability to intelligently sense varying light levels. Now, we begin to write the code.
I’m afraid I cannot go into super in-depth detail about it now – however, I will just go over the overall experience of programming the robot in C. It was up to us to set up the core components of the code including any variables we needed to use to keep track of things and while + if statements to cause the robot to move. We did this rather quickly.
Initially we kind of screwed up and it just kept going forward. This was because we had it constantly run a command to make the iRobot-create move forward instead of running the other nested if loops. So, we removed this command and made an if loop for it.
You may be wondering, “If loops, while loops, schmile loops. I’m not understanding what you are talking about.” If so, that is completely fine. I will try and explain the outline of our code here onward.
The General Design:
So, the code begins to run. It has the variables for detecting the light levels accounted for and it knows which ports the light sensors are plugged into. Therefore, we can gain a sense of how bright it is in front of the robot and a little to its sides. After we got this done, we started setting up the iRobot to move forward on its own. We fumbled with this at first, but then realized why it would only constantly move forward – slightly flawed coding.
After we fixed this small issue, we moved on to creating the while loop, which contained all the if loops; it also had the ability to cancel out of the while loop once certain criteria were fulfilled. The criteria we chose was for the iRobot to stop moving once the lightbulb placed in front of it got too bright for its liking. We enabled it to do this by measuring how bright the light was on each light sensor – if it detected light too far to the right, the left motor would speed up and correct its trajectory; this was the same except vice versa regarding the right-side motor and left side sensor.
Once we figured out how to get it to work, it ran like a beaut’. It ran fast at first trying to find the light source. Then, once the light source was in range, it made sure to correct for its direction and face the light while approaching it. This finally culminated in it stopping within about a foot or so of the bulb. Had we left out the line of code to stop the iRobot, it would have simply kept on going forward, even possibly damaging the light bulb or itself.
Many seemingly trivial things in programming can cause big issues, so it’s all about caring about what you do and taking it easy so you don’t get frustrated and give up. You never want to do a rush job when it comes to coding as every day programming becomes increasingly ingrained into our lives. Anyways, I do hope you enjoyed reading about our day working with the robot. While we haven’t completed the last bits of programming needed for the other variations of what the bot should do, we will be completely capable of tackling it come next week. Have a nice rest of your day, and I will see you around for next time!

![]()
From the blog CS@Worcester – Sean Raleigh's CS Blog by sraleigh62 and used with permission of the author. All other rights reserved by the author.